
PROJECT WILSON 2020
A DRIFTING BUOY STUDENT SCIENCE PROJECT
Technical Details
High-level Software Overview

Electrical Diagram

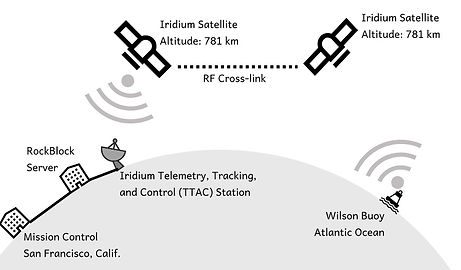
Network Diagram
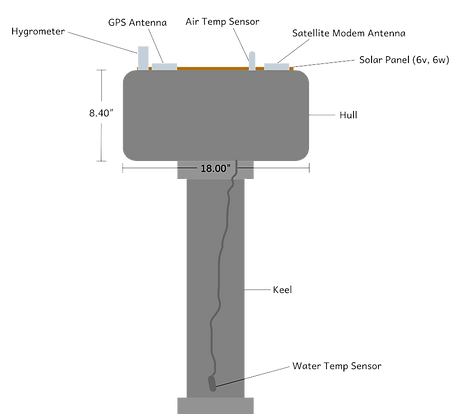
Build of Materials
Hull: Pelican 1450 case
Keel: generic PVC pipe, 6" diameter x 4' length
Main Controller: Arduino Pro Trinket 3.3v
Motherboard: custom-designed PCB from JLCPCB
Communications: RockBlock Iridium SBD 9603 Satellite Modem
GPS: Adafruit Ultimate GPS Breakout - 66 channel w/10 Hz updates - Version 3 (Kit version)
Solar Panel: 6v 9w Voltaic Solar Panel
Solar Charging Module: Adafruit USB / DC / Solar Lithium Ion/Polymer charger - v2
Temperature Sensors: DB1920 Waterproof Temperature Sensor (x3)
Hygrometer: SHT10 Waterproof Humidity/Temp Sensor
Barometer: MPL3115A2 - I2C Barometric Pressure/Altitude/Temperature Sensor
Battery: 6600mah 3 cell LiPo Battery
Internal Electronics Enclosures: generic ABC PCB project enclosures (x3)
Adhesives:
3M™ Marine Adhesive Sealant 5200
Desiccant: Damprid 10.5 Moisture Absorber


Communications
Wilson's onboard program attempts to transmit, or "uplink", information every 12 hours.
Each uplink consists of a data payload of approximately 77 bytes. We've minimized the payload and the frequency of uplinks for cost and power-consumption purposes. Satellite communication rates are relatively expensive (about $45/month) and establishing an uplink with satellites is the highest drain on the battery.
In the event Wilson cannot establish an uplink during a given cycle, it will try again after 10 minutes. If it again fails, Wilson will return to "sleep" and try again in 12 hours.